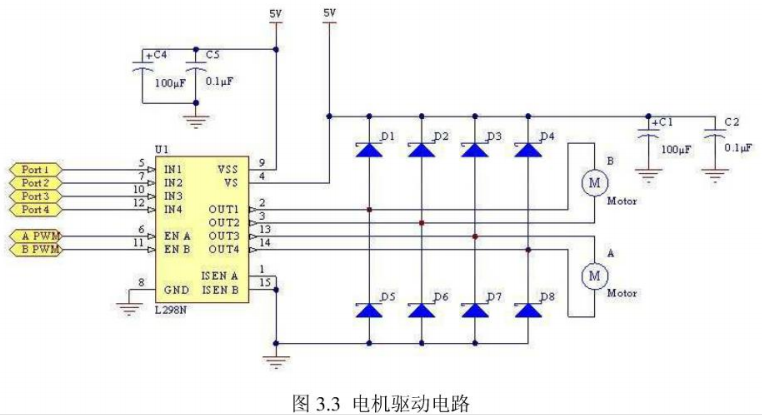
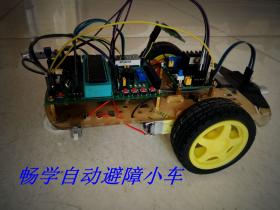
利用红外对管检测黑线与障碍物,并以STC89C52单片机为控制芯片控制电动小汽车的速度和转向,从而实现自动循迹避障的功能。其中小车驱动由L298N驱动电路完成,速度由单片机输出的PWM波控制。
一周搞定系列之模电_第12讲_模电实际电路设计
一周搞定系列之数电_第6讲_数电电路设计
国家级精品课程-浙江大学电子技术基础01
国家级精品课程-浙江大学电子技术基础04-05
国家级精品课程-浙江大学电子技术基础12-13
国家级精品课程-浙江大学电子技术基础10-11
开关电源电路设计的介绍
国家级精品课程-浙江大学电子技术基础02-03
x