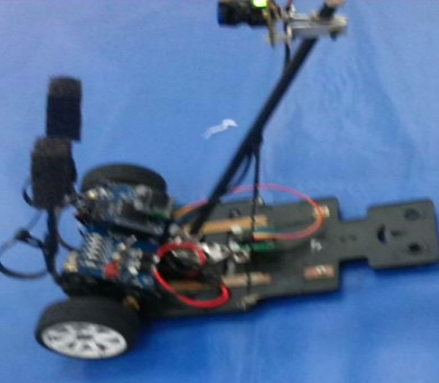
在摄像头识别路线方案当中,黑线的处理显得尤为重要,我们采用由比较器搭建的视频信号处理电路来识别黑线。我们将更多时间用在了控制方面,比如怎样使电机控制车模平衡与电机差速转向配合更加完美,为此我们进行大量的实验,最终决定采用动态打角行控制,而速度使用了 PID 控制,效果理想。
野火STM32视频教程:30-摄像头-火眼OV7725
深入浅出玩转STC15单片机-第03讲_如何学习STC15单片机
2.C51智能小车零基础操作篇2—智能小车驱动安装方法(全屏高清)
1.HJ-4WD智能小车零基础操作篇1-新手必看(全屏高清)
深入浅出玩转STC15单片机-第11讲_模块化编程实例介绍
深入浅出玩转STC15单片机-第17讲_数码管驱动器件74HC595的介绍
ASR M08-A语音识别控制模块 语音控制单片机
11.C51智能小车零基础入门篇1—51单片机最小系统(全屏高清)
x